Schematics
There are two sets of schematics needed to build Stubby: the PCB / electronics, and the frame. Both are available here. (Note: Stubby is under active development. It is recommended to see the Git repository for the current design; anything on this web page may be out of date.)
Electronics
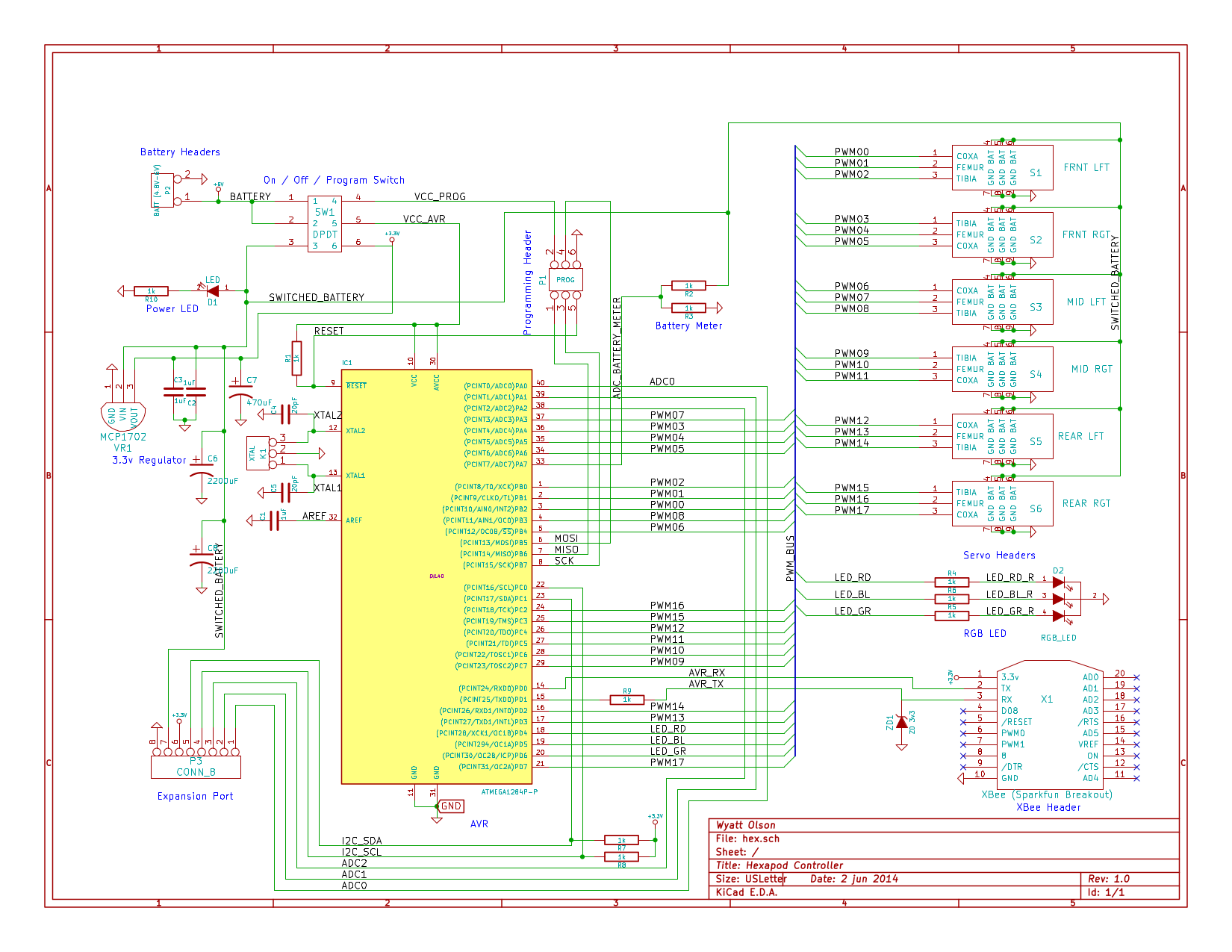
The electronics are relatively simple. Most of the board consists of traces between the servo headers and the main AVR chip. The rest includes the power regulator, radio, status LED, and misc. supporting components. You can see the diagram below, download the PDF, or refer to the original KiCad files
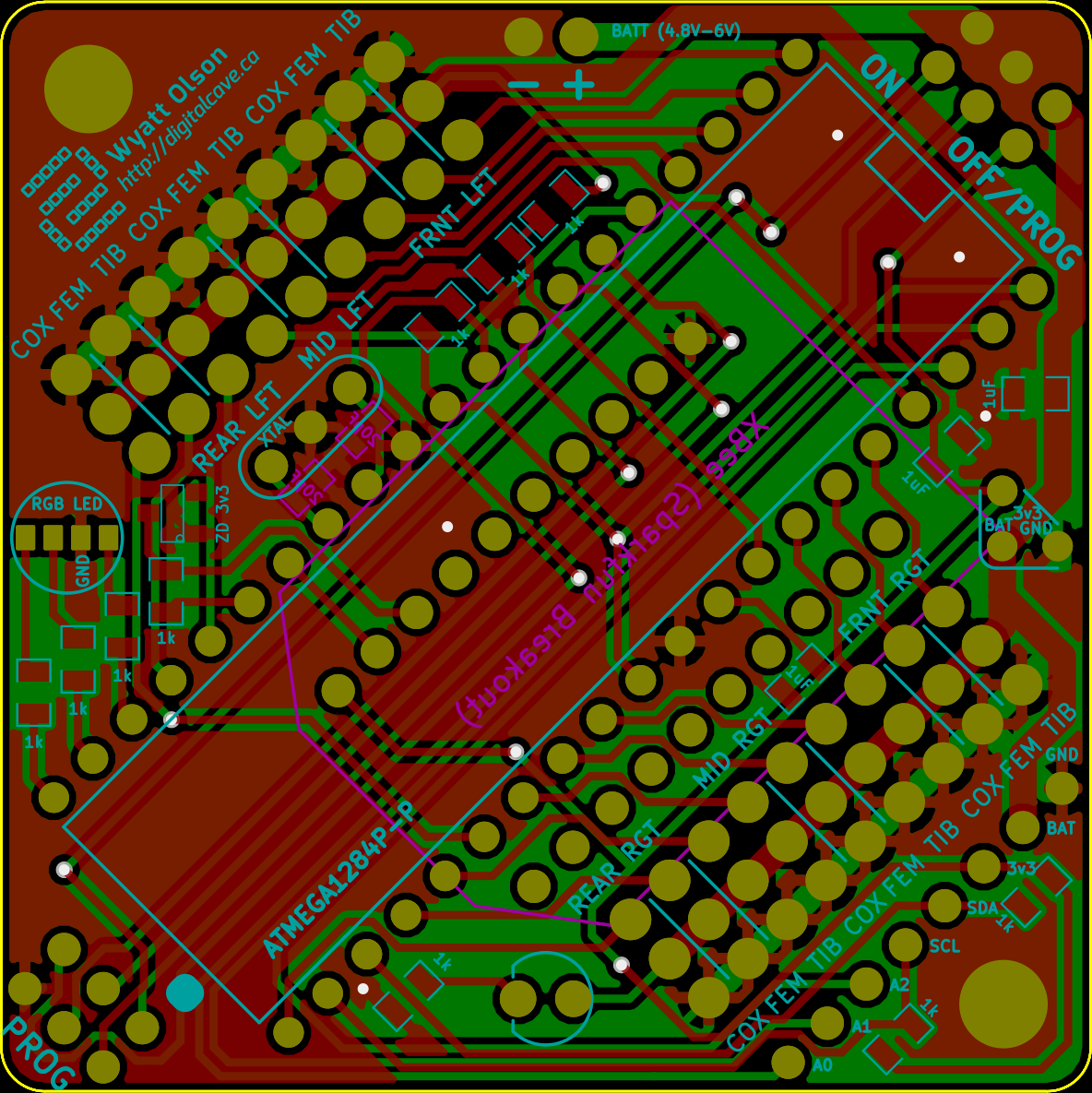
I designed a PCB which I then had printed in China. The layout is below. If you want to try making your own, the KiCad files + Gerbers are available.
Frame
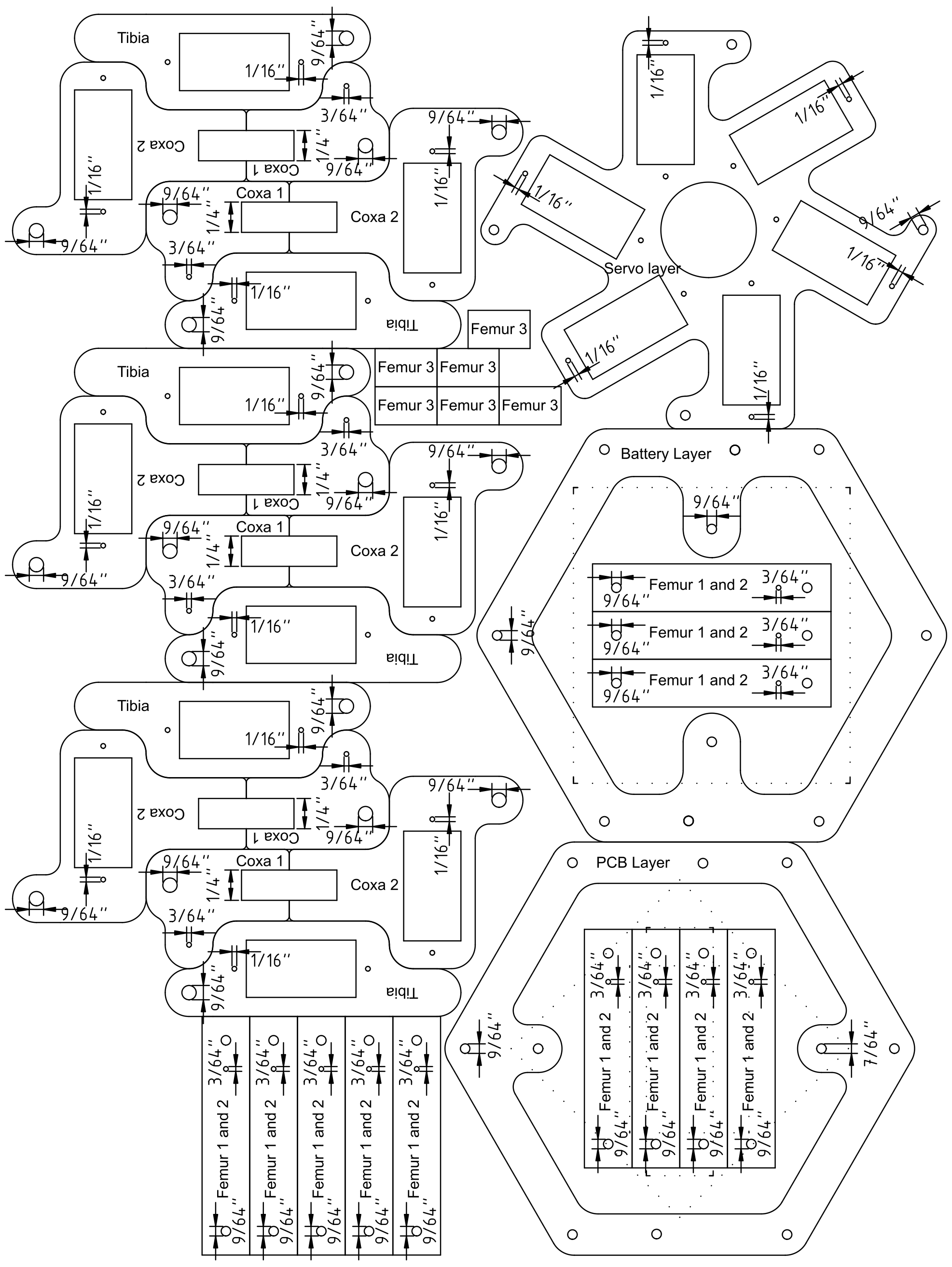
The frame is made entirely of 1/4" MDF, using mostly #6 screws for joints. White glue is used to assemble the femur and the coxa. I cut the frame on a scroll saw, but you could probably use a laser cutter or CNC machine too if you have them available.
All frame components are shown below, with everything fitting on a 8.5x11" sheet of paper. If using a scroll saw, print the PDF, cover your MDF with painters tape and glue the design to the tape. I have had good success with a #3 blade, but a #5 should work fine as well.
You can also download the .dxf files from the Git repository.